Project highlights
- An exciting opportunity to develop an autonomous unmanned surface vehicle (USV) equipped with water quality sensor to autonomously survey the aquatic environment and identify pollution sources.
- State-of-the-art pollution dispersion modelling for fast Bayesian inference with real-world field testing & application.
- Develop a physics-informed Bayesian inference algorithm to rapidly quantify the information gain of a possible sampling location.
Overview
Discharges of hazardous substances into aquatic environments, from frequent storm overflows of sewage water to incidental leaks of hazardous chemicals, pose a substantial risk to both public health and the aquatic ecosystem. In such incidents, it is imperative to accurately identify the release source, estimate its strength and reconstruct the spatio-temporal dispersion of potential pollutants. However, the fast-changing spatial-temporal dynamics of pollution makes it difficult to rely on existing monitoring stations and painstaking manual sampling to capture the morphology of pollutant plumes in different water conditions.
Unmanned surface vehicles (USVs), as agile/flexible robot platforms, e.g. UKCEH (2023), offer a promising alternative to environment monitoring via their mobility and onboard sensors. This project aims to develop an integrated active sensing framework, which will enable the USV to autonomously plan a survey path in the area of interest and infer the pollution source from observed data.
The “active sensing” capability means that a sensing agent, i.e., the USV, can incorporate perceived environment attributes (e.g., where the location of pollution source might be) to design a favourable sensing action, i.e., a survey path, which can lead to more informative water samples to improve the estimation of the pollution event. The overall framework is illustrated in Fig 1. The key components include a dispersion and transport model in the aquatic environment to characterise pollution event morphology, a Bayesian inference engine to estimate the key parameters in the pollution model, and an information-theoretic path planner, which finds an optimal path based on the reward function of the potential information gain (Hutchinson et al., 2020). This approach will be tested by simulation, in water tanks and by field deployment in real-world settings.
By working closely with the Environment Agency, the proposed solution will be of immediate use to government agencies, environmental surveyors and scientists, enabling a service to help meet the demand for regulated monitoring of water quality and providing an effective tool to track down other unknown pollution sources. Such a capability will eventually contribute to major UK government manifestos such as the 25-year Environment Plan and the Thames Vision 2050.
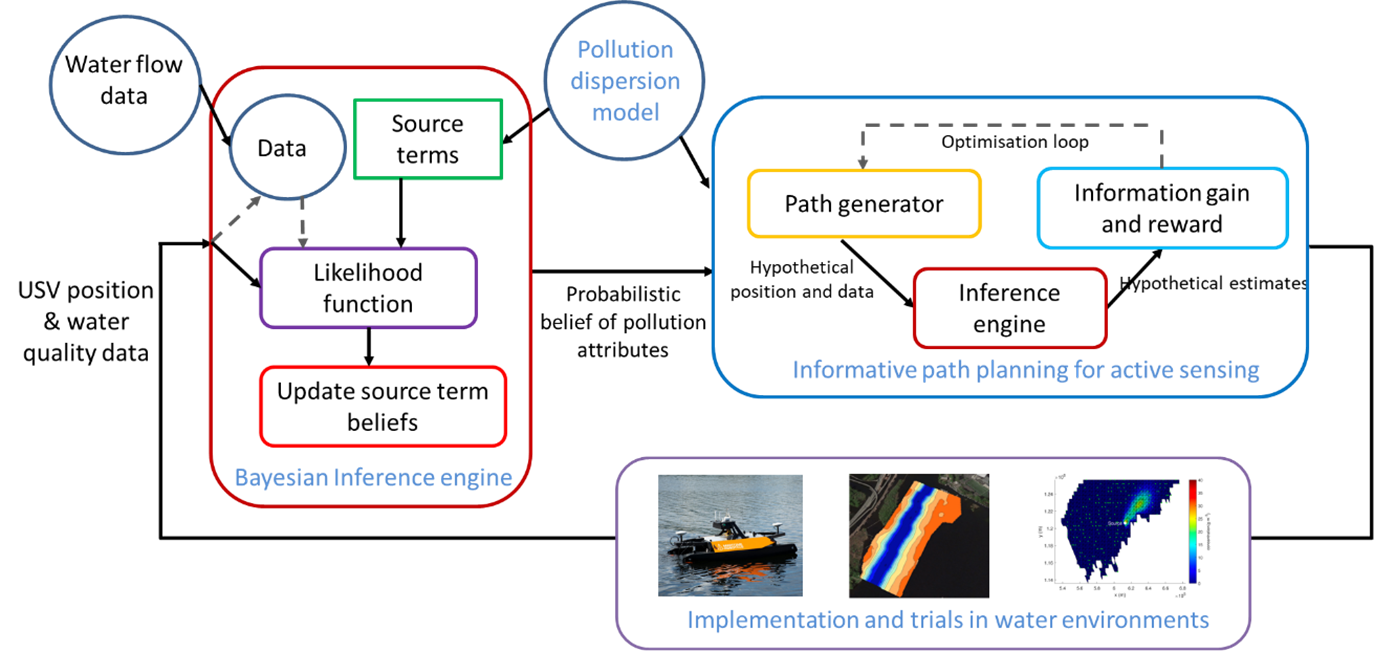
Figure 1: Active sensing framework for Unmanned Surface Vehicle (USV) using a Bayesian approach and optimising for tracking and pollution plume identification.
Host
Loughborough UniversityTheme
- Climate and Environmental Sustainability
Supervisors
Project investigator
Prof Cunjia Liu, Loughborough University: [email protected]
Co-investigators
Dr Christopher Harvey, Loughborough University: [email protected]
Dr Glenn Watts, Environment Agency: [email protected]
How to apply
- Each host has a slightly different application process.
Find out how to apply for this studentship. - All applications must include the CENTA application form. Choose your application route
Methodology
The successful PhD applicant will work with experts in robotics and autonomous systems engineering and fluid mechanics at Loughborough University and with applied environmental scientists at the Environment Agency to ensure end-user needs are fully taken into account. Innovative technical approaches will combine developing the fundamental convection-diffusion partial differential equation (PDE) using a dynamic transient finite-element method (FEM; Liu et al., 2023), using Bayesian inference engines using the recent message passing technique (Rhodes et al., 2023) and interfacing with sensor measurements, and designing a novel dual control (Rhodes et al., 2022) based reward function dedicated for pollution source localisation. These innovations will be integrated into a unified framework that can be deployed on USVs to track unknown pollution events, and will be tested experimentally and in the field.
Training and skills
Students will be awarded CENTA2 Training Credits (CTCs) for participation in CENTA2-provided and ‘free choice’ external training. One CTC equates to 1⁄2 day session and students must accrue 100 CTCs across the three years of their PhD.
Both technical and non-technical training will be provided to the student, working with experts in Loughborough University and the Environment Agency. Some examples are included as follows.
Technical:
- Solving PDEs using the FEM
- 3D Digital Image Correlation of surface deformation measurement
- Principles of Bayesian estimation and classical solving techniques such as Kalman filter and sequential Monte Carlo simulations
- Introduction to scientific computing with Python
- Introduction to robot operation system (ROS)
- Deployment of the USV in real-world settings to test its effectiveness in pollution monitoring from an end-user perspective (in collaboration with the Environment Agency)
Non-Technical
- Teaching related skills
- Health and safety training for field work and lab work
- Preparing journal articles in LaTeX
- Preparing publication-ready figures with LaTeX and tikz
Partners and collaboration
The UK Environment Agency (EA) is the biggest environmental protection agency in Europe, with wide-ranging regulatory and management responsibilities across air, land and water. The EA’s research group, part of the Chief Scientist’s Group, works to understand current and future environmental pressures and to find new approaches to environmental management in a changing world. The EA is interested in projects that provide new insights for tackling the big environmental problems and pressures we face in the UK, including climate change adaptation, aquatic pollution and environmental links to human health, and the PhD student would work closely with EA experts and real-world aquatic pollution settings.
Further details
Further details on how to contact the supervisor for this project and how to apply for this project can be found here:
For any enquiries related to this project please contact Prof Cunjia Liu ([email protected]) or Dr Christopher Harvey ([email protected]).
To apply to this project:
- You must include a CENTA studentship application form, downloadable from: CENTA Studentship Application Form 2024.
- You must include a CV with the names of at least two referees (preferably three) who can comment on your academic abilities.
- Please submit your application and complete the host institution application process via: https://www.lboro.ac.uk/study/postgraduate/apply/research-applications/ The CENTA application form 2024 and CV can be uploaded at Section 10 “Supporting Documents” of the online portal. Under Section 4 “Programme Selection” the proposed study centre is Central England NERC Training Alliance. Please quote CENTA 2024-LU9 when completing the application form.
- For further enquiries about the application process, please contact the School of Social Sciences & Humanities ([email protected]).
Applications must be submitted by 23:59 GMT on Wednesday 10th January 2024.
Possible timeline
Year 1
Development of the pollution dispersion model in aquatic environments using convection-diffusion PDE and dynamic transient FEM, which aims to discretise the PDE into linear static-space model to support the following-on Bayesian inference engine.
Year 2
Development and testing of the Bayesian inference engine to estimate the states and key parameters from the state-space model using collected point measurements of water quality, which will allow the reconstruction of the spatial-temporal dispersion of the pollution. Development of a fast inference solver to calculate the information gain.
Year 3
Development of the path planner, which incorporates the previously developed Bayesian inference engine and information gains in an optimisation loop to find the USV survey path. The whole framework will be fully tested in both simulation and real aquatic environments using small-scale USVs. Experimental testing of USVs is planned to include controlled release of non-toxic substances (e.g., food dye) in a large water tank, and field testing in regional rivers/lakes/reservoirs, in collaboration with the EA.
Further reading
Hutchinson, M., Liu, C., Thomas, P. and Chen, W.-H. (2020). Unmanned Aerial Vehicle-Based Hazardous Materials Response: Information-Theoretic Hazardous Source Search and Reconstruction. IEEE Robotics & Automation Magazine, 27(3), pp.108–119. doi: https://doi.org/10.1109/mra.2019.2943006.
Liu, Y., Harvey, C.M., Hamlyn, F.E. and Liu, C. (2023). Bayesian estimation and reconstruction of marine surface contaminant dispersion. [online] doi: https://doi.org/10.48550/arXiv.2309.00369.
Rhodes, C., Liu, C. and Chen, W.-H. (2022). Autonomous Source Term Estimation in Unknown Environments: From a Dual Control Concept to UAV Deployment. IEEE Robotics and Automation Letters, [online] 7(2), pp.2274–2281. doi: https://doi.org/10.1109/LRA.2022.3143890.
Rhodes, C., Liu, C. and Chen, W.-H. (2023). Structurally Aware 3D Gas Distribution Mapping Using Belief Propagation: A Real-Time Algorithm for Robotic Deployment. IEEE Transactions on Automation Science and Engineering, [online] pp.1–15. doi: https://doi.org/10.1109/TASE.2023.3249651.
UKCEH, UK Centre for Ecology & Hydrology. (2023) Remote controlled boats. [online] Available at: https://www.ceh.ac.uk/specialist-products/remote-controlled-boats [Accessed 1 Sep. 2023].